
1. 속도 제어가 중요한 이유
직류모터(DC Motor)는 전기에너지를 회전운동으로 바꾸는 장치입니다.
하지만 모터가 단순히 회전하는 것만으로는 충분하지 않습니다.
어떤 속도로, 어떤 부하에서, 얼마나 일정하게 회전하느냐가 핵심입니다.
하수처리시설의 송풍기, 슬러지 이송 스크류, 컨베이어, 밸브 구동기 등은
모두 “속도의 안정성”이 성능과 직결됩니다.
풍량, 이송 속도, 개도율, 처리 유량 등은 모터의 속도 변화에 따라 달라지기 때문입니다.
직류모터는 다른 모터와 달리 속도를 전기적 신호로 정밀하게 제어할 수 있는 장점을 가지고 있습니다.
그 원리와 방법을 체계적으로 살펴보겠습니다.
2. 기본 속도 방정식
직류모터의 회전 속도는 다음의 식으로 표현됩니다.
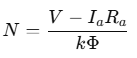
- N : 회전속도 (rpm)
- V : 공급 전압 (V)
- Iₐ : 전기자 전류 (A)
- Rₐ : 전기자 저항 (Ω)
- Φ (Phi) : 자속 (Wb)
- k : 비례상수
이 식은 곧 “속도를 바꾸는 방법”을 명확하게 보여줍니다.
| 제어 인자 | 변화 효과 |
| 공급전압(V) 변화 | 속도에 직접적인 영향 |
| 자속(Φ) 변화 | 역비례로 속도 조절 |
| 전기자저항(Rₐ) 변화 | 속도 감소 유도 |
직류모터의 속도는 전압, 자속, 저항의 세 요소로 제어할 수 있습니다.
3. 속도 제어의 기본 원리
속도 제어는 크게 두 가지 방식으로 구분됩니다.
- 전기적 제어(Electrical Control) — 전압, 전류, 자속 등의 전기신호를 조절
- 기계적 제어(Mechanical Control) — 부하나 토크를 조절 (효율 낮음)
현대 산업에서는 대부분 전기적 방식을 사용합니다.
특히 전기자 전압 제어, 계자 전류 제어, 전기자 저항 제어가 대표적인 세 가지 전기적 속도제어 방법입니다.
4. 전압 제어 방식 (Armature Voltage Control)
(1) 원리
속도식 N=(V−IaRa)/(kΦ)에서
자속 Φ를 일정하게 유지하고 전기자 전압 V를 변화시키면 속도가 선형적으로 변합니다.
즉, 전압을 높이면 회전속도가 비례적으로 증가하고,
전압을 낮추면 속도가 감소합니다.
(2) 특징
- 정토크 제어가 가능 (자속 일정)
- 속도-전압 관계가 선형적
- 효율이 높고 응답이 빠름
- 정밀 제어 회로를 구성하기 쉬움
(3) 제어 회로 예시
과거에는 직렬 저항을 이용해 전압을 떨어뜨리는 방식을 사용했으나,
현재는 전력전자소자(SCR, MOSFET, IGBT 등)를 이용한 PWM 제어 방식이 주류입니다.
PWM(Pulse Width Modulation)은
전압을 일정 주기로 빠르게 On/Off 하여 평균 전압을 조절하는 기술입니다.
이 방식은 효율이 높고 발열이 적으며, 정밀한 속도 제어가 가능합니다.
(4) 산업 응용
- 송풍기, 펌프, 컨베이어 등 일정 부하를 일정 속도로 구동할 때 사용
- 하수처리시설의 송풍량 제어, 밸브 구동기 개도율 제어 등
5. 계자 제어 방식 (Field Flux Control)
(1) 원리
속도식에서 자속 Φ는 분모에 존재하므로 자속을 감소시키면 속도는 증가합니다.

계자 전류를 조절하여 자속을 변화시켜 속도를 제어할 수 있습니다.
(2) 특징
- 자속 감소 시 속도 증가
- 하지만 토크는 감소 (T = kΦIₐ)
- 고속 운전용으로 적합
- 낮은 부하에서만 안정 동작
(3) 제어 방법
계자 회로에 가변저항(계자저항기, Field Rheostat)을 삽입하여
계자전류를 줄이면 자속이 감소하고, 회전속도가 증가합니다.
단, 너무 자속을 줄이면 브러시 스파크나 과속으로 이어질 수 있습니다.
(4) 적용 예시
- 슬러지 이송용 스크류의 고속 구간 운전
- 팬이나 송풍기의 풍량 조절용
- 부하가 가벼운 설비의 고속 구동
6. 전기자 저항 제어 방식 (Armature Resistance Control)
(1) 원리
전기자 회로에 가변저항을 추가하여 전류를 제한하는 방식입니다.
저항이 커지면 전기자 전류가 줄어 속도가 낮아집니다.
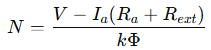
여기서 Rₑₓₜ는 외부 삽입 저항입니다.
(2) 특징
- 구조 간단
- 속도 감소만 가능 (가역 불가)
- 에너지 손실 및 발열 많음
- 효율 낮음
- 소형 실험장치, 교육용에 주로 사용
(3) 한계
이 방식은 전력 손실이 크고 열이 많이 발생하기 때문에 현대 산업에서는 거의 사용되지 않습니다.
대신 SCR 컨트롤러나 인버터를 이용한 전압제어 방식이 대체하였습니다.
7. 속도-토크 특성 비교
| 제어 방식 | 제어 변수 | 속도 변화 | 토크 변화 | 효율 | 특징 |
| 전압 제어 | 전기자 전압(V) | ↓V → ↓N | 일정 | 높음 | 선형 제어, 정토크 |
| 계자 제어 | 자속(Φ) | ↓Φ → ↑N | ↓T | 중간 | 고속용 |
| 저항 제어 | 전기자 저항(Ra) | ↑R → ↓N | ↓T | 낮음 | 비효율적, 구형 방식 |
8. 속도 제어 범위와 구간
직류모터의 속도 제어는 두 가지 구간으로 나뉩니다.
- 정토크 영역(Constant Torque Region)
- 전압 제어 구간
- 자속 일정, 토크 일정
- 속도는 전압에 비례
- 정출력 영역(Constant Power Region)
- 계자 제어 구간
- 자속 감소, 토크 감소
- 고속 영역에서 운전
이 두 구간을 결합하면 넓은 속도 범위를 정밀하게 제어할 수 있습니다.
예를 들어, 저속에서는 전압 제어로 정토크를 유지하고 고속에서는 계자 제어로 출력 일정 운전을 수행합니다.
9. 폐루프 속도 제어 시스템 (Closed-Loop Control)
현대의 DC 드라이브 시스템은 대부분 폐루프(Feedback) 제어 방식을 채택합니다.
이는 속도 센서(Encoder, Tachometer)를 이용해 실제 속도를 측정하고,
목표값과 비교하여 전압을 자동 조정하는 시스템입니다.
구성요소
- 속도 센서 (Tachometer / Encoder) — 실제 회전속도 측정
- 비교기(Comparator) — 목표 속도와 실제 속도의 오차 계산
- PID 제어기 — 오차를 보정하여 제어신호 생성
- PWM 전압제어 회로 — 모터에 인가되는 전압 조절
이 구조를 통해 부하 변화나 전원 변동에도 일정한 속도를 유지할 수 있습니다.
10. PID 제어의 적용
PID 제어는 폐루프 속도 제어의 핵심입니다.
오차(Error)에 따라 다음 세 가지 요소가 합성되어 제어됩니다.
- P(Proportional) : 오차 크기에 비례
- I(Integral) : 오차의 누적 보정
- D(Derivative) : 오차 변화율 보정
PID 제어기의 출력은 다음 식으로 표현됩니다.

이를 통해
- 속도 응답의 안정성 확보
- 오버슈트(과도반응) 최소화
- 부하 변동 시 자동 보상이 가능합니다.
11. 속도 제어의 실제 응용
(1) 하수처리시설 송풍기
- 공기공급량 제어를 위해 속도제어형 직류모터 사용
- 유량센서와 연동된 PID 제어
- 부하변화(수온, DO)에 따라 자동 보상
(2) 슬러지 탈수기 및 스크류 컨베이어
- 저속 고토크 영역 운전
- 전압제어 + 피드백 제어 병행
- 속도 안정성 확보를 통한 이송 효율 향상
(3) 밸브 구동기 (Actuator)
- 회전 각도와 속도 제어 필요
- BLDC 기반 직류모터 적용
- 정확한 위치 제어를 위한 센서 피드백 필수
12. 속도 제어는 ‘정밀성의 기술’
직류모터의 속도 제어는 단순히 회전수를 바꾸는 행위가 아닙니다.
그것은 전압, 자속, 전류, 피드백 신호가 동시에 조화를 이루는 전자기적 제어 기술입니다.
전압제어로 정토크 영역을 다루고 계자제어로 고속 영역을 확보하며 PID 폐루프 제어로 안정성을 완성하는 것 —
이 모든 요소가 모여 “정밀 회전”이라는 결과를 만듭니다.
하수처리시설, 산업 자동화, 운송 설비, 로봇 제어까지
직류모터의 속도제어 기술은 여전히 정밀제어 산업의 핵심으로 자리하고 있습니다.